在谈到三维激光扫描技术应用时,你能想到哪些领域?测绘?测量?文物存档?古建修缮?还是其他行业的应用呢?那么,高精度地图行业你能想到吗?自动驾驶行业你能想到吗?
其实三维激光扫描技术早已凭借其高精度、高效率等优势,悄悄打破次元,突袭进入如今炙手可热的高精度地图与自动驾驶行业。毕竟,在这个行业里论起大场景的数据精度,Who else?

11月份,我们的天宝X7小兄弟凭借其小巧轻便的身躯随天宝耐特三维部的同事登上了一趟特殊的灰机,他们的目的地是一处神秘且重要的核心技术研究基地。


三维部的同事携带天宝X7小兄弟来到的这个“神秘基地”主要研究的是自动驾驶技术,通过最高效率的无人驾驶技术实现内部厂区工作运转以及无人交通枢纽的建立。
但在实现内部厂区的自动驾驶的研发路上,有一个需要搞定的“拦路石”。那就是在实现无人驾驶规划线路上有一条深近200m、长4000m的无信号巷道,内部无明显特征,墙面光滑无凸起物,使用传统的数据采集方式效果以及精度都极不理想。

在业主单位愁眉不展之际,兼具智能、专业、高效、高精度等特点的天宝X7三维扫描解决方案被客户所选择。身经百战的我们会惧怕区区4km地下巷道吗?当然不!专业的人 专业的设备,区区4km的地下巷道算什么呢?

在经过强化升级与更新之后,天宝X7三维扫描仪已具备室内专用扫描模式,扫描1站仅需1分10秒,扫描精度小于2mm,在整个地下巷道的点云数据采集过程中,只花费了4小时便获取到过百站的数据。使用Trimble Realworks点云处理软件实现全自动化配准,并一键输出配准报告,配准成功后误差仅6mm。


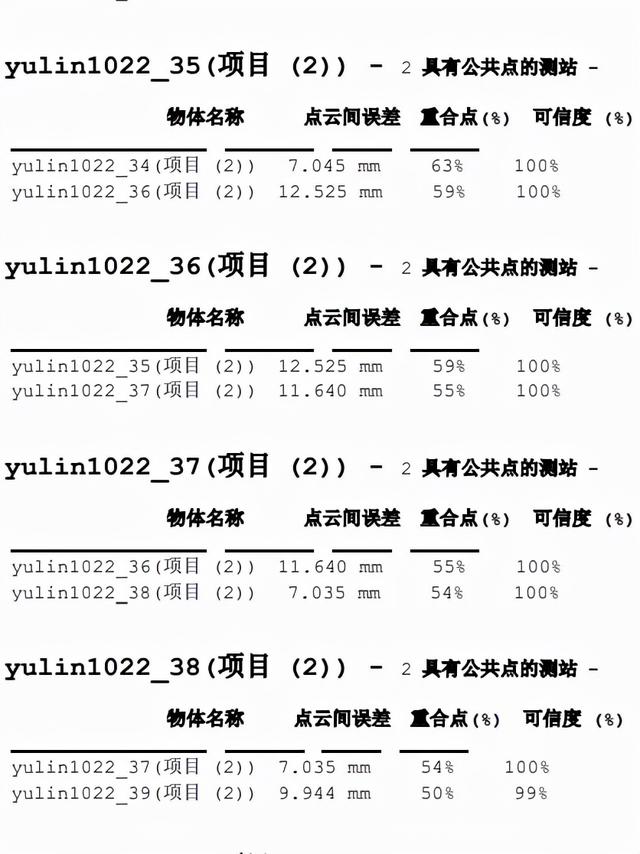
配准报告
接下来再看一下配准完成后的点云弯弯绕,就能清楚看到地下巷道的明显特征了。
点云成果展示:

过百站的测站点显示
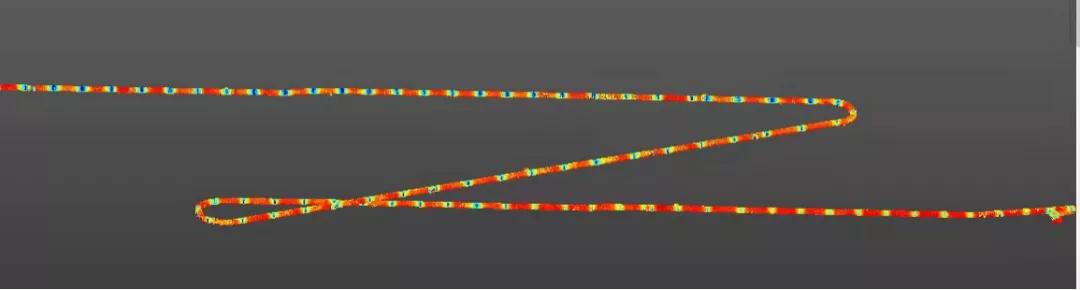
完整的走向及巷道数据

现场环境的内部高差

细节测站点云数据显示

基于高精度点云数据进行碰撞算法的编程及研究


进行场景区域道路网的建立与模拟测试
近年来,自动驾驶领域发展迅猛,高精度地图作为自动驾驶的关键需求,也逐渐受到越来越多的关注。但是与传统导航服务于人不同,高精度地图是服务于车的,需要让车代替人读懂地图,从而根据每个路径的变化判断行驶道路的安全与否,这对数据采集精度、效率有着更严苛的要求。
真正想要将自动驾驶技术做的更加完善成熟,我们需要具备超高精度且完整的基础数据服务于这项技术,多次实践测试积累,只有经历过多次公开实地试验与意外情况检测,才能够为实现自动驾驶技术的大量生产提供保障。鉴于国内对该项技术的深入研究,基础数据采集手段的不断更新,天宝耐特将发挥自己在高精度数据采集方面的优势,助力高精度地图及自动驾驶行业的全面普及。

文字 / 张慧娟、市场部
图片 /张慧娟、网络
排版 / 市场部
- END -
,