PPU为纯凸轮结构的移栽机械手,在步进马达的驱动下,执行元件沿预定的轨迹运行。通过电机的内置控制程序,可实现控制其在行程范围内任意位置停留,其单个工作周期最快为0.5秒,定位精度达到0.02mm

PPU移栽机械手由于定位精度高,响应速度快等特点,在机械自动化应用比较广泛。该机构主要由步进电机加减速机提供动力,旋转U槽件带动与凸轮随动器固定的Z轴吸盘沿着固定U槽实现运动,固定U槽即为运动的轨迹。可以适当的更改U槽实现想要的运动轨迹,从而实现从一个位置到达另一个位置的精准运动。移栽速度可控。
本机构为一种U型的移栽机械手,可实现将物料从一个位置抓取到另一个位置,可以控制速度,可以抓取不同的料件,抓取机构可以通过物料的特性做出更改。位置准确,控制方便,效率高。
动作流程:电机带动U槽件顺时针旋转→Z轴位置A吸取或放料→电机带动U槽件逆时针旋转→Z轴位置B吸取或放料。


结构原理分析:
吸取料件:通过一个吸盘吸取,可以适当的更改为夹爪。
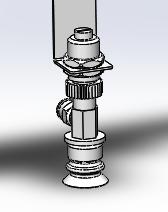
Z轴机构:Z轴主要为一条导轨滑块,导轨上固定安装一个凸轮随动器,吸盘与Z轴导轨安装,即吸盘和导轨可以沿着滑块运动;整个Z轴导轨滑块又可以沿着X轴移动

U槽机构:旋转U槽件沿着中心旋转,凸轮随动器即在U槽件的U槽内,又在固定U槽内;当旋转U槽件旋转时,凸轮随动器即沿着固定U槽移动,固定U槽即为运动轨迹。可以通过改变固定U槽的形状尺寸来改变运动的轨迹,也可以通过控制停止的位置来控制起点和终点的运动位置。

本实例结构仅供原理参考,具体设计应根据实际的需求情况设计。
,












