伺服驱动器使用方法大体和变频器一样,在这里需要注意的是伺服驱动器的选型不只有功率一个参数,还有低惯量和高惯量。
低惯量类型一般转矩低,转速高,适合一些负载轻,运动频繁的控制。高惯量类型转矩高,转速低,适合一些负载较大的控制。所以需要根据现场情况选择合适的驱动器,否则要不就是转速跟不上,要不就是电机过热影响寿命。
今天我们系统的学习一下伺服控制系统!
一伺服控制系统的控制方式伺服驱动器主要有三种控制方式;
1 转矩控制:
转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2 位置控制:
位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。
3 速度模式
通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
实例讲解如何使用PLC进行控制伺服驱动器PLC控制伺服驱动器的方法主要有两种;
1 脉冲控制:
这里我们以松下A5系列伺服驱动器配合西门子S7-200smart为例说明。
第一步,先接线,A5系列伺服驱动器需要接线的端子共有XA(供电电源的控制电源)、XB(电机输出线)、X4(控制线)和X6(电机编码器线)。我们看下接线图。(如果需要使用绝对位置控制,即是使用绝对编码器的话还需要通讯,绝对位置控制本身照比相对位置控制更加准确,且不受外界因素影响,缺点是绝对位置编码器不好维护,出现问题后需要手动复位,复位过程较麻烦,而且松下的驱动器为了保证绝对编码器的精度和安全,通讯使用的是很复杂的多次校验,对于新手很不友好,需要先学习中断,本篇文章不做拓展,如果敢兴趣的话请在评论区留言)




接完线后我们需要在驱动器上设置控制模式,参数等等。
其中,伺服系统的控制模式分为
一:位置控制模式
二:速度控制模式
三:转矩控制模式
四:全闭环控制模式
根据需要驱动的设备选择模式,每个模式的参数设置方法都不相同,但只要熟悉一个其他的调试起来也很快。

设置完参数后我们看下程序,以前我们说过,西门子s7-200smart系列对运动控制支持得很好,不仅最大脉冲数足够,而且运动控制非常方便,不需要拓展库文件。
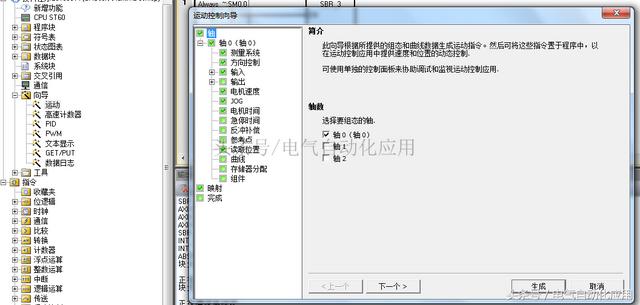







程序注释;第一行为驱动器使能行,没有的话驱动器无法动作,可以用来做紧急制动。
第二行为编码器清零,此文中的编码器为相对式。第三行为控制输出行,其中START端子应该由上升沿控制,文章中的是一个往复运动的例子。除了以上三个程序指令,运动控制还有其他功能,等着您来探索。
2 通讯控制:

谈到伺服驱动器我们就不得不提到西门子的V90系列,西门子V90有以下优点:
低成本
1、集成所有控制模式:外部脉冲位置、内部设定值位置、速度和转矩控制;2、全功率驱动标配内置制动电阻;3、集成抱闸继电器。
伺服性能优异
1、自动优化功能使设备获得更高的动态性能;2、自动抑制机械谐振频率;3、1 MHz 的高速脉冲输入;4、20 位分辨率的绝对值编码器;5、优化的系统性能:3 倍过载能力、电机低扭矩纹波以及驱动与电机的完美整合;
使用方便
1、快速便捷的伺服优化和机械优化;2、简单易用的 SINAMICS V-ASSISTANT 调试工具;3、兼容 PLC 和运动控制器的双通道脉冲设定值;4、通用 SD 卡参数复制;5、电机电缆连接器可旋转,支持多角度旋转,可快速锁紧/释放;
运行可靠
1、更大的电压范围:380 V ~ 480 V,-15% / 10%;2、PCB 涂层保证驱动器在严苛环境中的稳定性;3、高品质的电机轴承;4、电机保护等级 IP 65,轴端标配油封;5、集成安全扭矩停止(STO)功能;
功率范围 0.4至7KW;电压范围 3AC380V…480V( 10%/-15%);控制方式 外部脉冲位置、内部设定值位置、速度控制和扭矩控制;
这里我们以S7-1500与西门子V90伺服系统为例讲解通讯运动控制!
1、在TIA软件里组态PLC和V90PN硬件

在“网络视图”中,右边的“硬件目录”中选择“其他现场设备-Drives-SIEMENSAG-SINAMIS",下拉找到V90硬件,拖拽到左边。
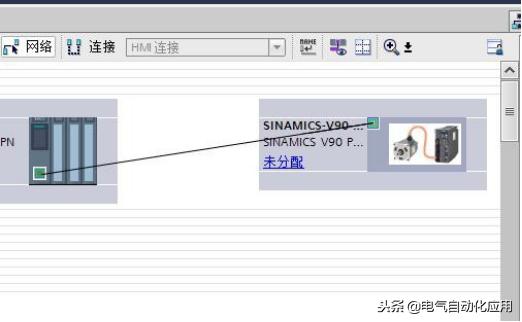
左键按住绿色网口图标,移动到对应设备进行网络连接

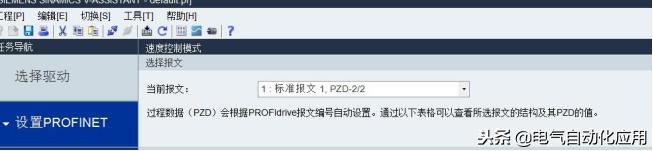
在网络视图中双击V90PN图标,配置V90PN的报文,位置控制选择111报文。

左键选中V90PN设备,在“属性”栏,命名设备的名称,要和V90驱动的名称一致


驱动的控制模式选择“基本定位器控制”

驱动报文选择“111报文”

斜坡函数发生器选择“生效”

调用SINA_POS对轴进行位置控制,在全局库中选择,打开右边“库”,选择“全局库”

SINA_POS指令说明,注意该指令必须使用“111报文”

ModePos: 控制模式选择
1、相对定位
2、绝对定位
5、直接设定零点
6、主动回原点
7、点动模式
Off1:轴使能,RejTrvTsk,IntMStop默认,AckFlt故障复位,Execute启动定位(上升沿),Position设置定 位距离(LU),Velocity定位时的速度(LU/min),OverV设定速度百分比输出,OverAcc设定加速度百分比输
出,OverDec设定减速度百分比输出,LAddrSP和LAddrAV报文地址,VeloAct实际速度,PosAct实际位置(LU) 例:实际设定速度=Velocity*OverV%
例:实际设定速度=Velocity*OverV%
注意:点动的速度在驱动里面设定,也可以通过调用SINA_PARA_S修改,VeloAct选择Lreal数据类型,防止数据溢出。

Velocity的设定值和驱动的单圈对应长度(LU)有关,默认设定是10000LU。

实 际 速 度 =NIST_B*P2000/40000000H(1073741824) 实际转矩=PZD12*P2003/4000H(16384)
Velocity=目标轴转速*单圈LU/1000
实际转速=VeloAct*额定转速/1073741824 实际位置=PosAct/单圈LU
注释:P2000为额定转速,P2003为额定转矩
例子:想设定轴转速为300r/min,单圈LU=10000,则Velocity=300*10000/1000。
参数读写功能

注意:AxisNo无论配置多少轴都设定为16#02
Start——上升沿启动
ReadWrite——0: 参 数 读 ,1: 参 数 写
LAddr—— 配 置 的 报 文
Parameter——参数编号,如P1120参数,则Parameter=1120
Index——参数下标,如P25467[1],则Index=1
ValueWrite——待写入参数的设定数值AxisNo——16#02
ValueRead——读入参数的存放数值
速度模式
驱动的控制模式选择“速度控制”

选择标准报文1,


Execute——速度启动/停止,
Velocity——轴转速(RPM)
LAddrSP,LAddrAV——组态报文FactRPM——额定转速
AckFlt——故障复位
VeloAct——实际转速(RPM)
好吧!其实工控的学习最重要的就是去动手实际操作了!
你们觉得西门子伺服系统怎么样?
,












